Pe pași de dans ai unui tânăr îmbrăcat în „robot”, Elon Musk a anunțat pe 19 august că a decis să construiască un robot umanoid, „Tesla bot”, care va fi „prietenos” și care „va elimina sarcinile plictisitoare, repetitive și periculoase” ale omului. Sună bine, dar e mai complicat decât pare (și decât probabil crede Musk). Iată de ce.
Problema principală este că lumea roboticii nu arată ca cea a mașinilor electrice când s-a apucat Musk de mașina Tesla. Adică tehnologia pentru un robot așa cum vrea Musk nu există (cel puțin nu există încă...).
Două companii care sunt lideri în domeniul roboților, Boston Dynamics și Agility Robotics, fac cercetare de zeci de ani și înțeleg bine dificultățile din „lumea reală”. Recent am publicat un scurt articol cu o demonstrație a abilităților de mișcare ale ultimei versiuni a unuia dintre roboții Boston Dynamics, denumit Atlas. Vă invit să aruncați o privire. Este impresionat, dar departe de ce vrea Musk să facă.
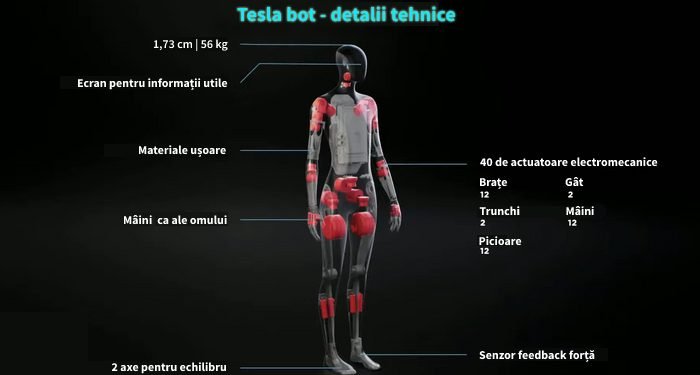
Date tehnice Tesla bot
Pare că primii pași au fost deja făcuți de inginerii lui Musk. Robotul, cum puteți vedea în imaginea de mai sus, beneficiază deja de o concepție minimală: forma exactă a unui om, 40 de actuatoare electromecanice (mecanisme care controlează acțiunile unui sistem), mâini ca ale unui om (human-level hands), materiale ușoare, ecran pe față pentru „informații utile”.
În domeniul roboticii, deși s-au făcut progrese în ultimii 20 de ani, există încă o lungă listă de progrese necesare, care se lasă așteptate, atât în domeniul hardware, cât și în cel software, care trebuie întâi rezolvate pentru ca tehnologia să ajungă acolo unde și-ar dori să fie Musk.
Prezentarea noului proiect, Tesla bot, de către Elon Musk:
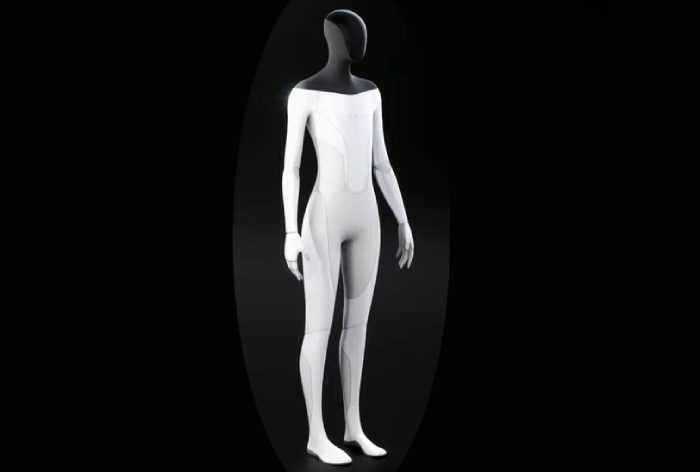
Cu suficienți bani și forță de muncă înalt specializată, Musk ar putea să aibă un robot care să arate ca cel din imaginile prezentate într-un an. Musk spune că va avea într-un an un „prototip care va arăta cam ca cel din imagini”. Partea dificilă va fi să aducă robotul la nivelul să facă lucruri utile. Omul de afaceri își arată și o îngrijorare: dacă robotul va putea fi autonom atunci când este lăsat liber în lume, adică să nu fie nevoie de o programare „linie cu linie” pentru fiecare tip de reacție pe care o va avea. Revenim la această îngrijorare peste două paragrafe, pentru a-i expune complexitatea.
Revenind la mâinile ca cele ale omului, aceasta este o reală provocare. Au fost, în fapt, deja realizate, dar sunt fragile și scumpe. De aceea roboții au astăzi 2 sau 3 degete. Este nevoie de multă ingeniozitate, muncă și bani pentru a produce o mână robotică realmente ca cea a omului, flexibilă, cu dexteritate și rezistentă. Să spunem (și să sperăm) că Musk va rezolva problema, atât hardware, dar mai ales software. A mai rămas restul robotului de făcut și gata :)
Ce înseamnă că robotul „va elimina sarcinile plictisitoare, repetitive și periculoase”? Asta rămâne de văzut. Probabil că nu-i e clar nici lui Musk. Dar să ducem gândul mai departe, pornind de la puținele idei avansate de acesta.
Va avea grijă de curățenia din casă? Va spăla vasele? Va merge să facă piața? Va duce mașina la service? Va merge să înnoiască abonamentul de metrou?
Una este ca un robot să facă un lucru într-un spațiu bine determinat, pe care va fi programat să-l învețe și să-l exploateze în detaliu, alta e să-i ceri să se miște în multiple medii.
Pentru a înțelege mai bine cum stăm astăzi, iată mai jos un robot (al Agility Robotics), vârf de gamă, mutând un colet dintr-un loc în altul:
Pentru a merge la piață, de pildă, la o privire rapidă, robotul trebuie:
· să coboare scările
· să deschidă uși mai ușoare ori mai grele cu diverse mecanisme de deschidere și închidere
· să țină cont de oamenii de pe scară la coborâre / urcare
· să fie atent să nu dea peste oameni când iese din bloc
· să știe pe unde să meargă pe stradă și să fie atent la toate detaliile care contează pe stradă
· să înțeleagă circulația pe drumurile publice
· să fie atent la mașini, biciclete, trotinete și oameni pe role
· să înțeleagă culorile semaforului (și să știe ce să facă atunci când semaforul nu merge)
· să știe unde este magazinul de unde vrea să cumpere lucruri pentru tine
· să intre în magazin, să ia cărucior și să știe să-l manevreze într-un mediu uneori aglomerat fără a răni pe nimeni
· să înțeleagă cum este organizat un magazin, să știe să găsească ce vrei tu să cumpere, să ia obiectul fără să-l spargă (poate e o sticlă de vin), să-l pună în cărucior, să plătească produsele și să iasă din magazin în siguranță
· să știe cum să reacționeze dacă altcineva vrea să-i ia produsele (poate apare vreun hoț?) șamd.
Acest comportament extrem de complex, dorit se pare de Musk pentru robotul lui, este departe de a fi rezolvat de tehnologia existentă. În fapt reprezintă parte din lista de probleme nerezolvate.
Revenim într-un an de zile și vom vedea dacă robotul lui Musk va face mai mult decât să meargă în condiții de laborator, să identifice o serie de obiecte, pe care să le manipuleze cu mișcări lente.
Un alt proiect al lui Musk unde este puțin probabil ca promisiunile acestuia să fie egalate de realitate este Neuralink, prin care acesta vrea să adauge un „strat superinteligent” creierului uman. Din păcate, deși progresele recente în domeniul interfețelor creier-computer sunt remarcabile, tehnologia actuală nu are nicio capabilitate de control al minții.
Sigur, Musk a avut un succes remarcabil în ce privește mașina electrică și racheta spațială reutilizabilă. Dar nu toate proiectele acestuia vor avea aceeași rată de succes.
Pe de altă parte, pentru a încheia într-o notă optimistă, dacă echipa de ingineri a lui Musk va reuși să obțină măcar un progres major într-un an, adică să reușească ceva din ce n-au realizat deja alții, atunci tot efortul va fi meritat cu certitudine.
Inspirat din Spectrum