În articolul de faţă am realizat un sumar al cărţii de fizică de clasa a IX-a, ce poate fi folosit de cei interesaţi pentru a-şi reîmprospătata cunoştinţele ori pentru a-şi consolida ceea ce ştiu.
Optica Geometrică
Fascicul de lumină: un grup de raze de lumină care pot fi concurente într-un punct (fascicul conic) sau paralele (fascicul paralel).
» Fasciculul conic poate fi divergent, când razele sale pleacă din vârful conului, sau convergent, când sensul razelor este spre vârful conului.
Principiile Opticii Geometrice:
» Principiul propagării rectilinii a luminii: Într-un mediu transparent și omogen lumina se propagă în linie dreaptă.
» Principiul independenței fasciculelor de lumină: Drumul unei raze de lumină este independent de acțiunea altor raze.
» Principiul reversibilității drumului razelor de lumină: Drumul unei raze de lumină nu depinde de sensul ei de propagare.
Reflexia și Refracția:
» Reflexia luminii este fenomenul de întoarcere a luminii în mediul din care a venit când întâlnește suprafața de separare dintre două medii
» Refracția luminii este fenomenul de schimbare a direcției de propagare a luminii la trecerea dintr-un mediu transparent în al mediu transparent
» Difuzia luminii este fenomenul de împrăștiere al luminii pe o suprafață. În general orice suprafață difuzează mai mult sau mai puțin lumina.
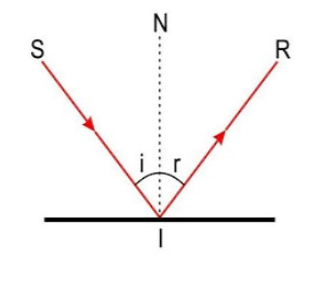
Legile reflexiei:
» Raza incidentă (SI), normala în punctul de incidență (NI) și raza reflectată (IR) sunt în același plan.
» Unghiul de reflexie (r) are aceeași măsură cu unghiul de incidență (i).
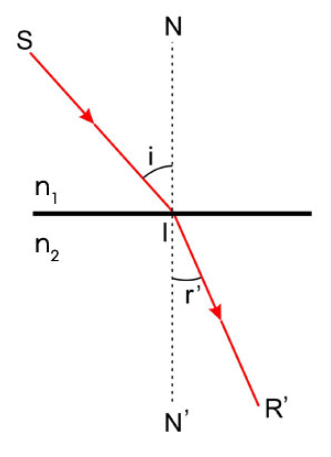
Legile refracției:
» Raza incidentă (SI), normala în punctul de incidență (N'I) și raza refractată (IR') sunt în același plan.
» Pentru două medii transparente și omogene ( și
) raportul dintre sinusul unghiului de incidență (i) și sinusul unghiului de refracție (r') este constant (
).
se numește indice de refracție relativ al mediului al doilea în raport cu mediul 1.
» Indicele de refracție absolut al unui mediu transparent () este egal cu raportul dintre viteza de propagare a luminii în vid (
~ 300 000 km/s) și viteza de propagare a luminii în mediul respectiv (
).
» Indicele de refracție relativ al mediului 2 în raport cu mediul 1 este:
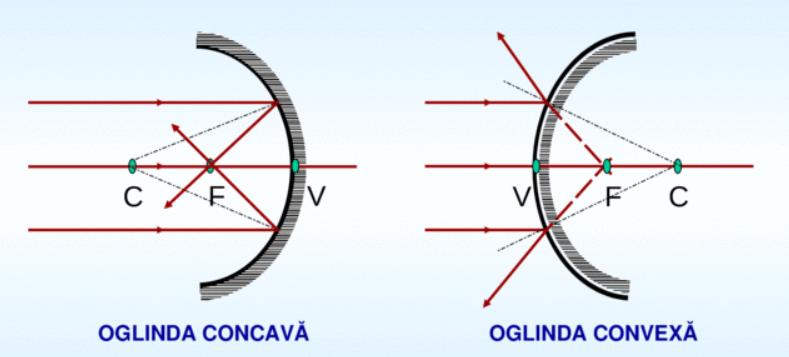
Oglinzi Sferice:
Elementele unei oglinzi sferice:
» centrul de curbură (C) - centrul sferei din care face parte calota sferică
» raza de curbură - raza sferei din care face parte calota sferică
» vârful oglinzii (V) - centrul calotei sferice
» focarul oglinzii (F) - punctul de intersecție al razelor reflectate (oglindă concavă) sau al prelungirilor acestora (oglindă convexă).
» Distanța de la vârful oglinzii la focar se numește distanță focală și este egală cu jumătate din raza de curbură.
» axa optică principală - dreapta care trece prin centrul de curbură și prin vârful oglinzii
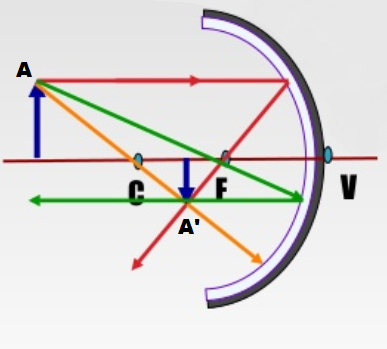
Construcții grafice de imagini în oglinzi sferice:
Pentru a obține grafic imaginea unui punct luminos A, este suficient să reprezentăm două din următoarele raze:
» o rază care trece prin centrul de curbură și se reflectă pe aceeași direcție
» o rază paralelă cu axa optică principală care, după reflexie, trece prin focarul oglinzii (oglinda concavă) sau prelungirea razei reflectate trece prin focar (oglindă convexă)
» o rază care trece prin focarul oglinzii și, după reflexie, devine paralelă cu axa optică principală
La intersecția celor două raze se obține grafic imaginea punctului luminos:
Lentile Subțiri:
Lentila este un mediu transparent și omogen mărginit de două suprafețe din care cel puțin una nu este plană.
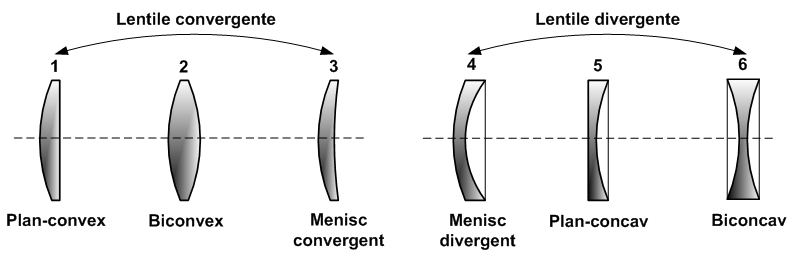
Tipuri de lentile:
» Lentile convergente - lentile mai groase la mijloc și mai subțiri la extremități; transformă un fascicul paralel într-un fascicul convergent
» Lentile divergente - lentile mai subțiri la mijloc decât la extremități; transformă un fascicul paralel într-un fascicul divergent
Elementele unei lentile mărginită de două suprafețe sferice:
» centrele de curbură ale suprafețelor sferice
» razele de curbură ale fețelor
» axa optică principală
» centrul optic al lentilei
» focarele principale ale lentilei
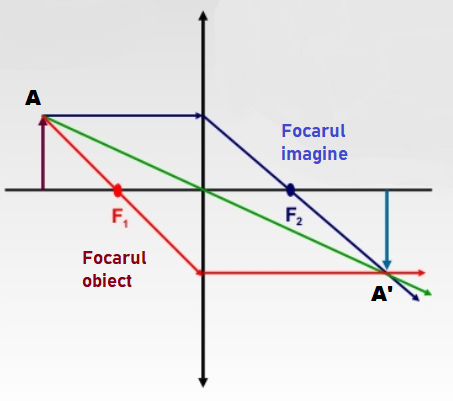
Construcții grafice de imagini prin lentile:
Pentru a obține grafic imaginea unui punct luminos A, este suficient să reprezentăm două din următoarele raze:
» o rază care trece prin centrul optic și traversează lentila fără să fie deviată
» o rază paralelă cu axa optică principală care, după refracție, trece prin focarul imagine (lentilă convergentă) sau prelungirea ei trece prin focarul imagine (lentilă divergentă)
» o rază care trece prin focarul obiect (sau a cărei prelungire trece prin focarul obiect) și, după refracție, devine paralelă cu axa optică principală
Principii și Legi în Mecanica Newtoniană
Mișcare. Repaus:
Un corp este în mișcare față de un reper dacă își modifică continuu poziția față de acesta. Repausul este un caz particular al mișcării.
Sistem de referință: un ansamblu format din reper, riglă pentru determinarea poziției și ceasornic pentru indicarea momentului acțiunii.
» Un obiect poate fi în mișcare față de un sistem de referință și în repaus față de altul: mișcarea este relativă.
Punct material: un punct geometric în care se concentrează întreaga masă a corpului pe care îl reprezintă și poziția relativă a corpului la un anumit moment în timp.
Traiectoria mișcării unui punct material este ansamblul pozițiilor succesive pe care le ocupă acesta în timpul mișcării față de sistemul de referință ales.
» După forma traiectoriei mișcarea unui punct material poate fi mișcare rectilinie (traiectoria este dreaptă) sau mișcare curbilinie (traiectoria este o curbă).
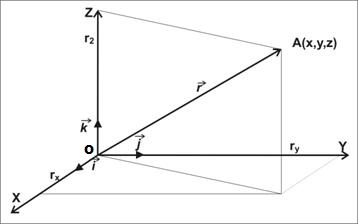
Mișcarea unui punct material în spațiu se reprezintă într-un sistem de trei axe de coordonate Ox, Oy și Oz perpendiculare între ele. Poziția unui punct material (A) la un moment dat se poate preciza cu ajutorul vectorului de poziție ().
» Vectorul de poziție al unui punct material la un anumit moment este vectorul care are originea în originea sistemului de axe de coordonate și vârful în punctul de pe traiectorie unde se reprezintă punctul material la acel moment.
Viteza medie () este mărimea fizică egală cu raportul dintre deplasarea punctului material (
) și intervalul de timp (
) în care s-a produs această deplasare.
» Unitatea de măsură a vitezei în S.I.:
Viteza instantanee () este mărimea fizică vectorială egală cu raportul dintre deplasarea mobilului (
) și intervalul de timp corespunzător (
) când
tinde la zero:
Mișcarea rectilinie uniformă:
Într-un S.R. dat, un punct material are o mișcare rectilinie uniformă dacă traiectoria sa este dreaptă, iar viteza sa este constantă.
Legea mișcării rectilinii uniforme:
Mișcarea circulară uniformă:
Într-un S.R. dat, un punct material are o mișcare circulară uniformă dacă traiectoria sa este un cerc, iar viteza sa unghiulară este constantă. Poziția unui punct material pe traiectorie la un moment dat (
), poate fi precizată cu ajutorul vectorului de poziție al punctului față de centrul cercului, numit rază vectoare (
). Alegând pe traiectorie un punct origine
și un sens de parcurgere a traiectoriei, poziția punctului
poate fi precizată indicând unghiul la centru
, numit și coordonată unghiulară.
» (radian). Un radian este unghiul la centru care subîntinde un arc de cerc cu lungimea egală cu raza cercului.
Viteza unghiulară medie () în timpul
în care raza vectoare descrie unghiul la centru
este dată de raportul:
Legea mișcării circulare uniforme:
Relația dintre viteza liniară și viteza unghiulară:
Perioada mișcării circulare uniforme () este timpul în care punctul material descrie o circumferință completă.
Accelerația medie () este mărimea fizică vectorială egală cu raportul dintre variația vitezei (
) și intervalul de timp (
) în care s-a produs această variație.
» Unitatea de măsură a accelerației în S.I.:
Accelerația momentană () este mărimea fizică vectorială egală cu raportul dintre variația vitezei (
) și intervalul de timp (
) în care s-a produs această variație, când
tinde la 0.
Legile mișcării rectilinii uniform variate:
» Legea vitezei în mișcarea rectilinie uniform variată:
» Legea mișcării rectilinii uniform variate:
Principiile mecanicii:
Principiul I al mecanicii (principiul inerției): Orice punct material își menține starea de repaus sau de mișcare rectilinie și uniformă atât timp cât asupra lui nu acționează forțe exterioare care să-i schimbe această stare.
Principiul al II-lea al mecanicii (principiul fundamental): Accelerația imprimată de o forță unui punct material are direcția și sensul forței fiind direct proporțională cu modulul forței și invers proporțională cu masa lui.
Principiul al III-lea al mecanicii (principiul acțiunii și reacțiunii): Dacă un corp (A) acționează asupra altui corp (B) cu o forță numită acțiune (), cel de-al doilea corp acționează asupra primului corp cu o forță (
) egală în modul, având aceeași direcție și opusă, ca sens, numită reacțiune.
Legea lui Hooke. Tensiunea în fire:
» Dacă asupra unui corp acționează două sau mai multe forțe, efectul poate fi deformarea corpului (efect static).
» Dacă corpul revine la forma și dimensiunile inițiale după încetarea acțiunii forțelor, deformarea se numește elastică, iar corpul se numește elastic.
» Dacă corpul nu revine la forma și dimensiunile inițiale după încetarea acțiunii forțelor, deformarea se numește plastică.
Legea lui Hooke:
unde:
este alungirea corpului
este lungimea inițială a corpului
este o constantă de material numită și modulul lui Young sau modulul de elasticitate la tracțiune
»
Raportul reprezintă forța exercitată pe unitatea de suprafață și se numește tensiune elastică sau efort unitar
»
Notăm unde
,
,
sunt constante specifice unui corp, deci:
se numește constantă elastică a corpului
» Forțele de interacțiune ce se exercită asupra unor corpuri prin intermediul unor fire se numesc forțe de tensiune.
Legile frecării la alunecare:
Ori de câte ori suprafața unui corp alunecă pe suprafața altui corp, fiecare exercită asupra celuilalt o forță paralelă cu suprafața de contact numită forță de frecare, care se opune mișcării unui corp față de celălalt.
Prima lege a frecării: Forța de frecare la alunecare între două corpuri nu depinde de aria suprafeței de contact dintre corpuri, ci doar de natura și gradul de șlefuire a suprafețelor aflate în contact.
Legea a doua a frecării: Forța de frecare la alunecare este proporțională cu forța de apăsare normală exercitată pe suprafața de contact.
Coeficientul se numește coeficient de frecare la alunecare și este adimensional
Legea atracției universale:
Oricare două corpuri punctiforme se atrag cu forțe orientate de-a lungul dreptei determinată de corpuri, al căror modul este direct proporțional cu masele corpurilor și invers proporțional cu pătratul distanței dintre ele.
este o constantă universală având aceeași valoare pentru orice pereche de corpuri din Univers:
Teoreme de variație și legi de conservare în mecanică
Lucrul mecanic. Puterea:
Lucrul mecanic al unei forțe constante al cărui punct de aplicație are o deplasare
este mărimea scalară definită prin relația:
unde
este unghiul dintre
și
.
» (joule)
Puterea mecanică medie () este mărimea fizică scalară numeric egală cu lucrul mecanic efectuat în unitatea de timp.
» (watt)
Lucrul mecanic al forței gravitaționale:
» Lucrul mecanic al greutății la coborâre:
» Lucrul mecanic al greutății la urcare:
» Lucrul mecanic al forței gravitaționale în cazul în care câmpul gravitațional nu este uniform, adică variază și ca valoare, și ca direcție este:
Unde este distanța inițială dintre corpuri,
este distanța dintre corpuri după o perioadă de timp,
și
sunt masele corpurilor, iar
este constanta de atracție universală.
Lucrul mecanic al forței elastice:
» Când resortul este deformat:
» Când resortul este comprimat:
Unde este deformarea resortului, iar
este constanta elastică a resortului.
Lucrul mecanic al forței de frecare la alunecare:
Unde (forța de apăsare normală),
este distanța parcursă de punctul de aplicație al forței
, iar
este coeficientul de frecare la alunecare.
Energia cinetică:
Energia este capacitatea unui sistem fizic de a efectua lucru mecanic în trecerea dintr-o stare în altă stare dată.
» (joule)
Orice punct material (corp) de masă aflat în mișcare cu viteza
față de un sistem de referință inerțial are o energie cinetică
. Energia sa cinetică se calculează cu relația:
Teorema variației energiei cinetice: La deplasarea unui punct material față de un sistem de referință inerțial, variația energiei lui cinetice este egală cu lucrul mecanic efectuat de forța rezultantă care acționează asupra acestuia.
Energia potențială:
Sistemele deformabile (cele ale căror părți își schimbă în timp poziția relativă) au energie potențială dacă părțile lor interacționează prin forțe conservative.
Variația energiei potențiale a unui punct material este dată de relația:
Unde este lucrul mecanic al tuturor forțelor conservative ce acționează asupra punctului.
Energia potențială gravitațională:
» În cazul unui câmp gravitațional neuniform:
Energia potențială elastică:
Legea conservării energiei mecanice: Energia mecanică totală a unui sistem izolat, între părțile căruia se exercită numai forțe conservative este constantă în timp (se conservă).
Legea variației energiei mecanice totale: Variația energiei mecanice totale a unui sistem mecanic izolat este egală cu lucrul mecanic total al forțelor neconservative care acționează între părțile sistemului.
Randamentul mecanic:
Lucrul mecanic al forței necesare pentru a învinge o forță rezistentă (de exemplu greutatea) se numește lucru mecanic util ().
Lucrul mecanic efectuat de o forță activă (forța care “învinge” forța rezistentă) se numește lucru mecanic consumat ().
Randamentul mecanic () al unui mecanism este raportul dintre lucrul mecanic util și lucrul mecanic consumat. În practică, randamentul nu poate fi egal cu 1 datorită frecării și altor moduri de pierdere a energiei.
Teorema variației impulsului:
Impulsul punctului material () este mărimea fizică vectorială egală cu produsul dintre masa (
) și viteza lui (
):
»
Teorema variației impulsului unui punct material: Variația impulsului punctului material raportată la intervalul de timp în care se produce această variație este egală cu forța rezultantă medie ce acționează asupra punctului material.
Legea conservării impulsului punctului material: În sistemele de referință inerțiale impulsul unui punct material izolat se conservă () adică punctul se mișcă rectiliniu uniform sau este în repaus.
Legea conservării impulsului unui sistem de puncte materiale: Dacă rezultanta forțelor exterioare ce acționează asupra unui sistem de puncte materiale este permanent nulă, atunci impulsul total al sistemului rămâne constant, adică se conservă.
Ciocniri:
În general, ciocnirea a două corpuri macroscopice are două faze:
» Faza comprimării (deformării reciproce) începe când corpurile ajung în contact și se termină când viteza unuia față de celălalt este nulă, iar deformările reciproce sunt maxime. În această etapă o parte a energiei cinetice a corpurilor se transformă în energie de deformare.
» Faza separării începe la terminarea fazei comprimării. În această fază corpurile caută să revină la forma inițială și să se depărteze unul față de celălalt. În cazul unor corpuri perfect elastice acestea revin complet la forma inițială, iar energia de deformare se retransformă în energie cinetică. În această situație ciocnirea se numește perfect elastică, iar energia cinetică totală după ciocnire este egală cu cea dinaintea ciocnirii.
» În cazul corpurilor care s-au deformat plastic, faza separării lipsește, iar energia cinetică (cea care se transformase în energie de deformare în prima fază) se transformă în alte forme de energie (în special, căldură). Ciocnirea se numește plastică.
Ciocnirea plastică:
Două puncte materiale de mase și
având vitezele
și
se ciocnesc plastic. După ciocnire se formează un singur corp cu masa
și viteza
, iar o parte din energia cinetică a corpului devine căldură. Viteza se va determina aplicând legea conservării impulsului total, iar căldura degajata va fi determinată folosind legea conservării energiei totale a sistemului:
Viteza după ciocnire ():
deci:
Căldura degajată prin ciocnire ():
deci:
Ciocnirea perfect elastică:
Deși în natură nu există ciocniri perfect elastice, dacă două puncte materiale de mase și
având vitezele
și
care se ciocnesc unidimensional (înainte și după ciocnire, particulele se mișcă pe aceeași dreaptă), perfect elastic, vitezele lor după ciocnire (
și
) vor fi determinate aplicând legea conservării impulsului sistemului și legea conservării energiei cinetice a sistemului:
și
deci:
» Dacă ciocnirea nu este unidimensională, mai multe informații sunt necesare pentru a afla vitezele corpurilor după ciocnire, de exemplu, direcțiile de mișcare după ciocnire.
Elemente de statică
Sunt situații în care corpurile nu mai pot fi considerate ca puncte materiale și trebuie să ținem cont de forma, dimensiunile și distribuția substanței din care sunt alcătuite. În acest caz, considerăm corpul ca fiind alcătuit dintr-un sistem de puncte materiale.
Dacă distanța dintre orice pereche de puncte materiale ale corpului rămâne aceeași, corpul se numește solid rigid.
Statica este partea mecanicii care studiază echilibrul solidului rigid sub acțiunea forțelor exterioare care acționează asupra lui.
Mișcarea de translație:
Un corp solid are o mișcare de translație dacă oricare ar fi două puncte ale solidului, segmentul care le unește își păstrează direcția în timpul mișcării.
» În mișcarea de translație toate punctele solidului au traiectorii, viteze și accelerații identice și de aceea această mișcare poate fi descrisă de mișcarea unui singur punct material ce aparține corpului.
Mișcarea de rotație:
Un corp solid are o mișcare de rotație în jurul unei axe, atunci când orice punct al său descrie un arc de cerc cu centrul pe axă (numită axă de rotație).
Echilibrul de translație:
Un solid este în echilibru de translație dacă nu are mișcare de translație (echilibru static) sau are mișcare de translație rectilinie și uniformă (echilibru dinamic).
Condiția de echilibru de translație: Rezultanta forțelor care acționează asupra solidului este zero.
Echilibrul de rotație:
» Produsul vectorial a doi vectori - prin produsul vectorial al vectorilor și
se obține vectorul:
Care are:
modulul:
direcția: perpendiculară pe planul
sensul: de înaintare al unui burghiu drept, care, așezat perpendicular pe planul determinat de cei doi vectori, se rotește în sensul în care s-ar roti primul vector spre cel de-al doilea pe drumul cel mai scurt
Momentul forței față de un pol
este mărimea fizică vectorială definită prin relația:
Unde este vectorul poziție al punctului de aplicație al forței
în raport cu polul
.
Momentul forței față de o axă
este mărimea fizică vectorială definită prin relația:
Unde este vectorul poziție al punctului de aplicație al forței
în raport cu un punct
(punctul de intersecție al axei cu planul perpendicular pe axă ce trece prin punctul de aplicație al forței
), iar
este componenta forței
conținută în planul perpendicular pe
.
Un solid este în echilibru de rotație în raport cu o axă când este în repaus sau se rotește uniform în jurul axei.
Condiția de echilibru de rotație: Momentul rezultantei forțelor care acționează asupra solidului este zero.
Echilibrul corpurilor și energia potențială:
» Un corp sau un sistem fizic este în echilibru stabil dacă la mici deplasări față de poziția de echilibru, el revine de la sine în această poziție.
» Când un corp se află în echilibru stabil, energia lui potențială este minimă.
» Un corp sau sistem fizic se află în echilibru instabil dacă la mici deplasări față de poziția de echilibru, el nu revine de la sine în această poziție.
» Când un corp se află în echilibru instabil, energia lui potențială este maximă.
» Un corp, sau în general un sistem fizic, tinde spre acea stare în care energia sa potențială este minimă, stare în care echilibrul sistemului este stabil.